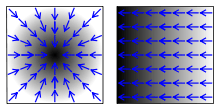
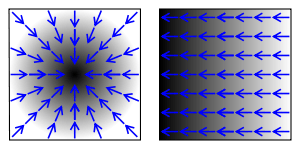
Les lignes bleues représentent le gradient de couleur du plus clair vers le plus foncé
En physique et en analyse vectorielle, le gradient est une grandeur vectorielle indiquant la façon dont une grandeur physique varie dans l'espace. En mathématiques, le gradient est un vecteur représentant la variation d'une fonction par rapport à la variation de ses différents paramètres.
Il est courant, selon la façon de noter des vecteurs, d'écrire le gradient d'une fonction
ainsi :
g r a d → f {\displaystyle {\overrightarrow {\mathrm {grad} }}~f} ou ∇ → f {\displaystyle {\overrightarrow {\nabla }}f} (nabla f {\displaystyle f} )
Souvent, en typographie, on préfère mettre un caractère en gras pour afficher son caractère vectoriel :
.
Le gradient est d'une importance capitale en physique, où il fut d'abord employé. Utilisé en théorie des variations, il est aussi fondamental dans le domaine de l'optimisation ou de la résolution d'équations aux dérivées partielles. Il peut être intéressant d'en voir certains exemples avant d'en donner une définition plus mathématique.
Le gradient de température
Gradient dans une seule direction (dérivée)
Supposons que l'on place une poutre rectiligne entre deux murs qui n'ont pas la même température, le mur de gauche étant le plus froid. On observe que la température de la poutre n'est pas constante et qu'elle varie de façon croissante de la gauche vers la droite. À ce phénomène thermodynamique, on associe un phénomène de flux de chaleur, lui-même lié à un gradient de température, c'est-à-dire à une variation le long de la poutre de la température, cf. Conduction Thermique, loi de Fourier.
Si on part de l'extrémité gauche de la poutre avec une abscisse x = 0 et qu'on atteint l'autre extrémité de la poutre pour une abscisse x = L (la longueur de la poutre), on définit la température en un point x qu'on écrit T(x). La température T est dite fonction de x.
Entre deux points très proches, distants d'une longueur δx, on mesure un écart de température δT. Au sens usuel, le gradient (de température) est justement le rapport entre ces deux grandeurs
-
Au sens analytique (mathématique), on parle de gradient si cette grandeur admet une limite quand δx tend vers 0, limite notée
-
Propriétés
Le rapport δ T δ x {\displaystyle {\tfrac {\delta T}{\delta x}}} a un signe, ce qu'on traduit par un sens. Dans le cas qui nous intéresse, il fait plus froid à gauche de la poutre qu'à droite, donc le gradient est orienté vers la droite puisqu'on parcourt aussi la poutre de gauche à droite par l'abscisse x.
En dimension 1, il y a convergence de la notion de gradient et de dérivée
En physique, la norme de ce gradient est homogène à une température divisée par une distance (mesuré en K·m), ou plus usuellement en °C·m.
Gradient de température dans l'espace à trois dimensions usuel
En réalité, la température de la poutre varie en fonction d'un déplacement dans l'espace. On caractérise un point de l'espace, M, en fonction de ses coordonnées u → = ( x , y , z ) {\displaystyle {\vec {u}}=(x,y,z)} . De même que précédemment, on décrit la température comme fonction : T(x, y, z).
Pour chacune de ces directions, on peut écrire une variation, dite partielle. Si, tout en étant en 3D, on ne se déplace que selon un axe, par exemple selon les ordonnées y, alors on peut réécrire la même formule que précédemment sur l'accroissement de température. Cependant, pour marquer la variation, on passe par l'écriture en dérivée partielle (dite "ronde") plutôt que par la dérivée unidimensionnelle (dite droite). On écrit par exemple la variation le long de y ainsi l'approximation (dite du premier ordre) :
-
On se déplace dans la poutre d'un point M à un point M' tels qu'ils définissent le vecteur :
-
.
De M à M' , la température passe de la T(x,y,z) à T(x+hx,y+hy,z+hz). En première approximation, cette variation est une fonction linéaire de
et s'exprime comme somme des variations liées à chacune des composantes de
-
On crée alors un vecteur appelé gradient de température
-
Notez que c'est bien un vecteur. Dans ce cas, on peut réécrire la relation précédente sous la forme
-
où "
" est le produit scalaire usuel de
et le symbole
signifie que le terme qui reste est négligeable par rapport à
.
Propriétés
Le gradient est un vecteur de même dimension que l'espace sur lequel porte la température (ici ℝ) alors que la température est fonction de support à trois dimensions mais à valeur réelle scalaire (i.e. la température en un point est un nombre, pas un vecteur).
La direction du (vecteur) gradient définit de nouveau la direction du plus froid au plus chaud, mais cette fois en 3D.
La norme du gradient de température est toujours homogène à K.m.
Introduction par les éléments différentiels
Comme pour la différentielle dont il est une variante, le gradient peut être introduit avec le vocabulaire des éléments différentiels. À titre d'exemple on examine le problème de la variation de l'aire d'un rectangle.
Considérons dans le plan (xOy ) un rectangle de côté x et y. Sa surface est égale à xy et dépend des coordonnées x et y du point M. En suivant une démarche intuitive, on convient de noter par dx une très petite variation de la variable x. Lorsqu'on fait subir au point M un déplacement très faible, la surface va changer et on peut écrire que :
-
On en déduit facilement que
-
Une simple application numérique où x et y seraient des mètres et dx et dy des centimètres illustre que dxdy est négligeable par rapport aux autres grandeurs.
On peut donner un statut mathématique précis aux notations dx et dy (qui sont des formes différentielles), et à la quantité dxdy qui est alors du second ordre. Le calcul précédent est en fait un calcul de développement limité à l'ordre 1, faisant intervenir les dérivées premières de la fonction xy par rapport aux deux variables.
On écrit donc :
-
-
.
Toutes ces égalités sont différentes façons d'écrire un produit scalaire de deux vecteurs :
-
où
-
.
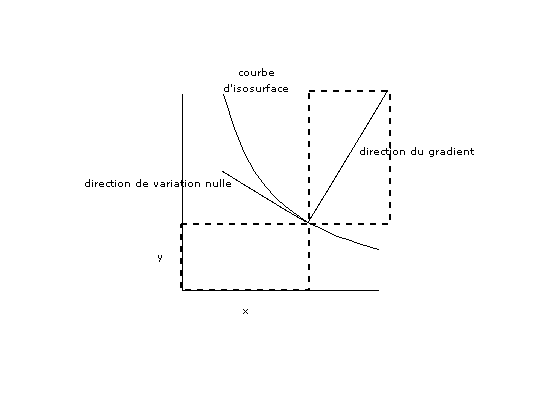
L'intérêt de l'introduction de ces vecteurs pour exprimer la variation d'une fonction de plusieurs paramètres est de visualiser le fait que la fonction va varier le plus dans la direction du vecteur gradient et qu'elle ne va pas varier pour tout changement des paramètres dans une direction perpendiculaire au gradient.
-
pour :
dans notre exemple du rectangle.
Ceci donnera en électrostatique les courbes de même potentiel : les « équipotentielles ».
Définition mathématique
Gradient d'une fonction réelle définie sur un espace euclidien
Contexte
Soit E un espace vectoriel euclidien et soit U un ouvert de E. Soit f : U → R {\displaystyle f:U\to \mathbb {R} } une fonction différentiable. Soit a un élément de U. On note alors D a f {\displaystyle {\mathcal {D}}_{a}f} la différentielle en a, qui est une forme linéaire sur E. On note ( D a f , u ) {\displaystyle ({\mathcal {D}}_{a}f,u)} l'image par cette différentielle d'un vecteur u de E.
Existence et unicité
Il existe un vecteur A tel que pour tout vecteur u de E, ( D a f , u ) = ⟨ A ∣ u ⟩ {\displaystyle ({\mathcal {D}}_{a}f,u)=\langle A\mid u\rangle } , où l'on a noté ⟨ ⋅ ∣ ⋅ ⟩ {\displaystyle \langle \cdot \mid \cdot \rangle \,\!} le produit scalaire dans E.
Le vecteur A est appelé gradient de f en a, et il est noté
. Il vérifie donc :
-
Expression canonique (dérivées partielles)
Puisque le gradient est lui-même un vecteur de E, il est naturel qu'on cherche à l'exprimer dans une base orthonormée
de cet espace vectoriel. On démontre qu'il s'exprime à l'aide des dérivées partielles sous la forme
-
Par exemple, en dimension 3, on obtient :
-
Changement de base
Lors d'un changement de base, au travers d'un C-difféomorphisme de E, l'écriture du gradient suit les règles usuelles des changements de base.
Attention, il ne faut pas confondre changement de base pour l'expression d'une fonction écrite en notations cartésiennes (canoniques) et écriture du gradient adaptée à une notation autre. Par exemple pour une fonction exprimée en coordonnées polaires on calcule l'écriture « polaire » du gradient en partant d'une fonction explicitée en fonction de l'abscisse polaire (ρ) et de l'argument (θ) f(ρ,θ).
coordonnées cylindriques (pour les coordonnées polaires, ne considérez pas la composante en z)
-
coordonnées sphériques
-
les vecteurs de type
sont des vecteurs propres aux coordonnées polaires
Cas général
Gradient et espace de Hilbert
Soient ( H , ⟨ ⋅ , ⋅ ⟩ ) {\displaystyle (H,\langle \cdot ,\cdot \rangle )} un espace de Hilbert(de dimension finie ou non), U un ouvert de H et f une application de U dans ℝ, différentiable en un point a de U. La différentielle D a f {\displaystyle {\mathcal {D}}_{a}f} étant, par définition, une forme linéaire continue sur H, il résulte alors du théorème de représentation de Riesz qu'il existe un (unique) vecteur de H, noté ∇ f ( a ) {\displaystyle \nabla f(a)} , tel que
Le vecteur
est appelé le gradient de f en a.
On montre que si
, alors
croît strictement dans la direction
, c'est-à-dire que pour tout
suffisamment petit,
.
Gradient et variété riemanniene
On peut encore étendre cette définition à une fonction différentiable définie sur une variété riemannienne (M,g). Le gradient de f en a est alors un vecteur tangent à la variété en a, défini par
-
.
Enfin, si f est un champ scalaire indépendant du système de coordonnées, c'est un tenseur d'ordre 0, et sa dérivée partielle est égale à sa dérivée covariante : ( ∇ f ) i = ∂ i f = f , i = f ; i {\displaystyle (\nabla f)_{i}=\partial _{i}f=f_{,i}=f_{;i}} . En coordonnées contravariantes, on calcule le champ de vecteurs appelé gradient de f :
-
Cette formule permet, une fois établi le tenseur métrique, de calculer facilement le gradient dans un système de coordonnées quelconque.
Développement limité
Si une application admet un gradient en un point, alors on peut écrire ce développement limité du premier ordre
-
ou alors :
Numériquement, il est très intéressant de faire ensuite la demi différence des 2 développements pour obtenir la valeur du gradient et on note que celui ci ne dépend pas en fait de la valeur de la fonction au point x :
. Cette formule a l'avantage de tenir compte des gradients 2 et est donc beaucoup plus précise et numériquement robuste. L'hypothèse est bien sûr, en pratique, de connaitre les valeurs "passé et futur" de la fonction autour d'un petit voisinage du point x.
Propriétés géométriques en dimension 2 ou 3
Classiquement, on sait que le gradient permet de définir la « normale aux courbes de niveau », ce qui se traduit en 2D et en 3D par des propriétés géométriques intéressantes. La propriété de tangence étant liée à la convexité/concavité, il est aussi intéressant de voir le lien qui existe entre gradient et convexité, toujours en 2D ou 3D.
Dimension 2 : gradient normal à une courbe en un point, droite tangente
On considère
continûment différentiable. Soit une courbe définie par l'équation f(u)=k, où k est une constante. Alors, en un point v donné de cette courbe, le gradient s'il existe et n'est pas nul, donne la direction de la normale à la courbe en ce point v. La droite tangente à la courbe est alors orthogonale au gradient et passe par v.
Application au traitement d'image: Une image est en fait une fonction à 2 variables noté p(x,y), chaque valeur entière de x et y constitue un pixel de l'image et la valeur prise p(x,y) est appelé "niveau de gris" du pixel pour une image en "noir et blanc". Il est indispensable en pratique d'estimer "la droite tangente à la courbe" même si la fonction p n'est pas analytique (p est inconnue) et n'est peut être pas différentiable au point (pixel) d’intérêt. On calcule numériquement les 2 gradients notés gx et gy suivant x et y par exemple avec ces formules simples gx=(p(x+1,y)-p(x-1,y))/2 et gy=(p(x,y+1)-p(x,y-1))/2. Ces formules ne font appel qu'à seulement 2 pixels chacun pour le calcul et on doit supposer alors qu'il n'y a pas de bruit dans l'image. La fonction p n'étant pas analytique et de valeur numérique connue uniquement en des points discrets (les pixels voisins), on peut utiliser diverses formules pour estimer le mieux possible (c'est l'art de l'ingénieur de gérer le cas très difficile de l'image bruitée!) ces gradients de l'image. On cite par exemple le template de Prewitt qui permet , utilisant la proximité des autres pixels de l'image (3 par 3 soit 9 pixels et tout) d'évaluer les gradients gx et gy du pixel d’intérêt situé au centre par convention du template. Repérant dans une image donnée les pixels ayant des forts gradients, ceux ci peuvent servir d'amers, c'est à dire des points particuliers reconnaissables (notés dans une carte par exemple) permettant de se situer dans l'espace, autrement dit de recaler sa navigation. Les gradients gx et gy forment une direction (c'est en fait un vecteur) et on a aussi une information angulaire : Il est possible de recaler des angles de prise de vue, très utile pour le pilotage guidage des drones aériens par exemple.
Dimension 3 : gradient normal à une surface en un point, plan tangent
Soit une application
continûment différentiable. Soit une surface définie par l'équation f(u)=k, où k est une constante. Alors, en un point v donné de cette surface, le gradient s'il existe et n'est pas nul, donne la direction de la normale à la surface en ce point v : le plan tangent à la surface est alors orthogonal au gradient et passe par v.
Gradient et convexité
Soit une application f : R n → R {\displaystyle f:\mathbb {R} ^{n}\to \mathbb {R} } ( n ∈ { 2 , 3 } {\displaystyle n\in \{2,3\}} par exemple) continûment différentiable. Si l'application ∇ f : R n → R n {\displaystyle \mathbf {\nabla } f:\mathbb {R} ^{n}\to \mathbb {R} ^{n}} est monotone (resp. strictement monotone), alors f est convexe (resp. strictement convexe). C'est-à-dire, en utilisant la caractérisation par les cordes :
-
Cette propriété est intéressante parce qu'elle reste valable même quand f n'est pas deux fois différentiable.
Si f est deux fois différentiable, le hessien est positif si et seulement si le gradient est monotone.
Cas de la dimension 1
La monotonie telle que définie ci-dessus permet de définir une fonction croissante ou décroissante au sens usuel. Dans le premier cas, on parle de fonction convexe, dans le second de fonction concave.
Si la fonction est deux fois dérivable, la croissance de la dérivée (donc du gradient) est assurée par la positivité de la dérivée seconde (équivalent du hessien).
Relations vectorielles
En analyse vectorielle, le gradient peut être combiné à d'autres opérateurs. Soit f une fonction décrivant un champ scalaire, que l'on suppose de classe C par rapport à chaque paramètre, alors :
-
;
-
;
-
.
Sources et références
(en) Serge Lang, Fundamentals of Differential Geometry, Springer
(en) Barrett O'Neill, Elementary Differential Geometry, 2 éd. révisée (ISBN 9780120887354)
 词典释义:
词典释义:
 物学】级度
物学】级度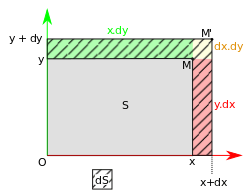
 )算符
)算符

 为极角,
为极角, 方位角。
方位角。